Expedición CONICET
¿Cómo funcionan los robots que utilizaron para la expedición CONICET?
Miércoles 20 de agosto de 2025 / Actualizado el miércoles 20 de agosto de 2025
Lo explica Leonardo Giovanini, docente de la Facultad de Ingeniería y Ciencias Hídricas (UNL), investigador del Instituto de Investigación en Señales, Sistemas e Inteligencia Computacional (SINC(I)) y especialista en robótica y vehículos no tripulados.
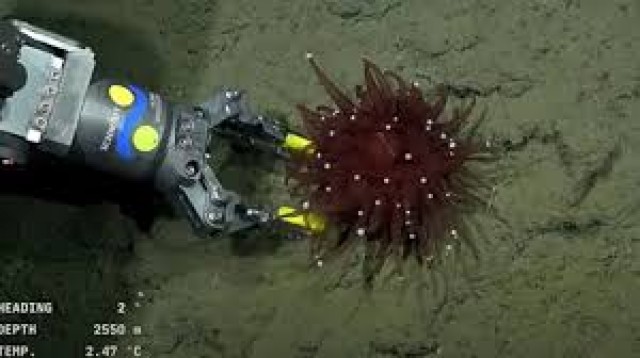
La expedición submarina del CONICET en el Cañón Submarino de Mar del Plata fue un hito histórico para la comunicación de la ciencia. El especialista en robótica y vehículos no tripulados, Leonardo Giovanini, visitó el programa radial de LT10 "El quinto elemento" para explicar cómo funciona la tecnología que permitió la exploración de las profundidades del Atlántico Sur. Mediante robots, se pudo explorar la biodiversidad marina a más de 3900 metros, capturando imágenes en alta definición y recolectando muestras sin alterar el entorno.
Giovanini es docente investigador de la Facultad de Ingeniería y Ciencias Hídricas (FICH-UNL) y del Instituto de Investigación en Señales, Sistemas e Inteligencia Computacional (SINC(I)), una institución de doble dependencia de la Universidad Nacional del Litoral (UNL) y el CONICET. Se encuentra desarrollando un sistema de control automático para vehículos terrestres. El proyecto busca crear tecnología que podría aplicarse a una amplia gama de usos, desde la agricultura de precisión hasta la vigilancia urbana.
La belleza de la ciencia
“En época estudiantil, un profesor de matemática me decía: “Aprecien la belleza de la ecuación”. En ese momento, me causaba gracia, risa; aunque con el transcurrir del tiempo comencé a distinguir la belleza implícita en la ciencia, que es difícil de estimar si no se tiene el conocimiento técnico”, indicó Leonardo Giovanini, docente-investigador de la Facultad de Ingeniería y Ciencias Hídricas de la UNL e investigador del Instituto de Investigación en Señales, Sistemas e Inteligencia Computacional (SINC(I)) y añadió “para nosotros, los humanos, es muy difícil pensar en la autonomía, es decir, es muy simple realizar tareas sin ayuda de nadie, como por ejemplo, cruzar una calle, subir a un colectivo, agarrar un frasco de mermelada; pero lograr la autonomía de un robot es una labor compleja dado que hay que confeccionar un programa para que el robot realice su tarea sin colaboración de nadie”.
“En este marco, podemos destacar el semáforo que se halla incrustado en la vida cotidiana de la ciudad dado que es el robot más elemental, pero un robot al fin”, recalcó Giovanini.
Labor colaborativa y en equipo
“En la robótica y en la actividad científica en general se trabaja en equipos interdisciplinarios; uno no puede hacer las investigaciones y producciones sólo, en un laboratorio, aislado del mundo”, indicó Giovanini y prosiguió “nosotros apuntamos a colaborar con la sociedad, realizando aplicaciones que mejoren la calidad de vida de la gente, por ejemplo elaborando tractores con navegación autónoma”.
“En Argentina no estamos lejos de fabricar robots, porque conocimiento, expertise hay; sólo falta financiamiento”, concluyó Giovanini.
Cómo trabajan
El equipo de investigación es dirigido por el Guido Sánchez, investigador del Instituto de Investigación en Señales, Sistemas e Inteligencia Computacional (SINC(I)) y co-dirigido por el Leonardo Giovanini. El proyecto, titulado "Sistema de control automático para vehículos terrestres con geometría variable", tiene como objetivo principal diseñar y probar un sistema de control para vehículos no tripulados (UGV) que operan en ambientes exteriores. Estos UGV, a menudo equipados con implementos o acoplados (por ejemplo la maquinaria agrícola), cambian su configuración geométrica con el tiempo, lo que dificulta el control preciso de su trayectoria.
Estos científicos proponen utilizar una técnica de control predictivo para generar y seguir trayectorias. Esto es especialmente relevante en giros, donde el implemento puede seguir un camino distinto al del vehículo.
El proyecto, de tres años de duración, tiene como objetivo principal el desarrollo de tecnología de vanguardia que pueda beneficiar a la industria nacional. Busca reducir los costos de automatización y disminuir la dependencia de la importación tecnológica.
"Mis áreas de interés abarcan la estimación y el control de sistemas dinámicos, con un enfoque particular en vehículos autónomos, ya sean terrestres, acuáticos o aéreos, así como sistemas embebidos y programación de FPGA. He intentado cultivar un perfil equilibrado que integra el desarrollo teórico en el ámbito de la estimación y el control, utilizando métodos de horizonte móvil (MHE y MPC), con la implementación práctica de los algoritmos resultantes en sistemas tecnológicos. Esta trayectoria me ha permitido profundizar en los desafíos asociados a la implementación de algoritmos en sistemas de tiempo real, lo que ha enriquecido mi capacidad para desarrollar algoritmos innovadores que son, a su vez, viables en la práctica", expresó Guido Sánchez.
 Espere por favor....
Espere por favor....